Projects
Liquid Rocket Engine
Date: April 2023 - Current
Club: SLO Propulsion Technologies
Location: Cal Poly, SLO
Role: Propulsion/Mechanical/Software
-
Rapidly developed a 700 lbf liquid rocket engine (nitrous/IPA) and tested within 2 academic quarters (~5 active months)
-
The engine is designed for the Collegiate Propulsive Lander Competition (CPLC website: landerchallenge.space)
-
Led 5-person rocketry team to successful engine throttle test, demonstrating throttle control to 16% max thrust
-
Actively iterating on design, manufacturing, and integration of phenolic ablative thrust chamber assembly (TCA) and nozzle
-
Independently developed regeneratively cooled engine & owned the entire lifecycle process (design, fab, integration, test)
-
Performed fluid system sizing analysis to determine manifold, injector, thrust chamber, and valve specifications
-
Tuned ox and fuel valves and wrote "ignition sequence" code with millisecond accuracy to enable ignition
-
Overcame hard start engine failure by improving ignition start up sequence and procedure revisions within 7 days
-
Experienced over 20 different engine failures, analyzed failure modes, and made design & manufacturing improvements
-
Managed testing operations for over 30 hot-fire tests and responsible for mechanical, fluid, and software system checkouts
-
Created Kalman filter for thrust sensor feedback, PID throttle control and state machine ignition sequence in C++
-
Complete ownership over development of 6 Degrees of Free (DOF) simulations, guidance, navigation and control (GN&C) algorithms of hop vehicle
See YouTube video's here:
TVC Milestone Campaign
Throttle Milestone Campaign
Regen Channels

Injector + Manifold

Hot-fire Attempt #6: TVC (CPLC Milestone)

-
Attempted TVC 10 second hot-fire

.jpg)

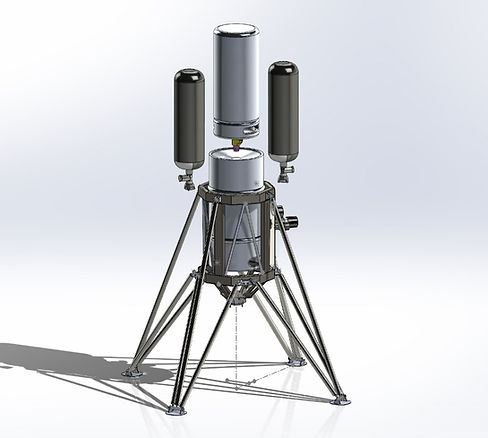
TCA Assembly

TCA CAD Assembly

Vehicle in progress...
Dynamics & Control
Date: March 2023
Club: Cal Poly Simulation Lab
Location: Cal Poly, SLO
Role: Modeling, Simulation, Software
Objective: This project was to explore the dynamics and control of an inverted pendulum and act as a testbed for control strategies and demo.
Skills/Technologies Used: MATLAB/Simulink for simulations, C++ for LQR controller, 3D printing and Arduino for implementation and testing.
Modeling and Simulation: Monte-Carlo style simulations to determine realistic constraints and optimal system parameters like pendulum length, mass, and motor torque specifications etc.
Implementation: An LQR controller was developed to compute optimal control inputs based on the current state measured by an Inertial Measuring Unit (IMU) to maintain upright stability.
Results and Learnings: The project successfully modeled and simulated the dynamics of an inverted pendulum and implemented an LQR controller to achieve self stability.


Electric Car - 1,000+ Mile Distance Car
Date: October 2022 - June 2023
Club: Prototype Vehicle Laboratory
Location: Cal Poly, SLO
Role: Aeroshell Team: Carbon Composite Manufacturing / mechanical design



Door Hinging IDR
Thrust Vector Control Model Rocket
Date: June 2022 - Spring 2023
Club: Personal Project + Cal Poly Undergraduate Research
Location: Cal Poly, SLO
Role: Software/Mechanical/Electronics
TVC Rocket PID control software github: https://github.com/RyanPettigrew/tvc
